Ce texte est le deuxième d’une série portant sur la navigation astronomique. Il expose la théorie nécessaire pour comprendre comment la technique fonctionne. L’accent est sur la compréhension, par opposition au calcul: on regarde le big picture. Pas de calculs!
L’idée est de comprendre quelles sont les simplifications requises pour arriver à la méthode la plus employée pour déterminer sa position, soit la méthode Marcq Saint-Hilaire. Avoir une bonne compréhension de cette théorie permet de comprendre la recette. Ce faisant, on minimise les erreurs de calcul lorsqu’on l’applique.
La navigation astronomique s’est développée avec les besoins de navigation et notre compréhension de l’astronomie. Son développement commence à l’époque où les Grecs pensaient que la terre était au centre de l’univers (modèle aristotélicien). On sait aujourd’hui que plusieurs des idées employées dans cette théorie sont, au sens du rasoir d’ockham, fausses. Ces idées demeurent employées parce qu’elles fonctionnent, au sens où elles permettent de se positionner.
Quatre simplifications pour une théorie pratique
Tout l’appareillage de calcul de navigation astronomique repose sur quatre simplifications de l’univers:
- que la terre est au centre de l’univers;
- que les étoiles sont fixes dans le ciel;
- que les étoiles sont tellement loin que les rayon de lumière qui en émanent sont parallèles;
- que tout segment de cercle, s’il est suffisamment petit, est indiscernable d’une droite.
Un système de coordonnées
Si on accepte les deux premières simplifications, alors la position angulaire de chaque étoile est fixe. C’est ce qui nous permet d’établir un système de coordonnées servant à cartographier la position des étoiles en fonction des angles.
On se rappelle qu’un système de coordonnées requiert un point de référence et deux axes dotées d’une échelle. Sur terre, le point de référence du système de coordonnées est l’intersection du méridien de Greenwich et de l’équateur (coordonnée (0°, 0°)). Les deux axes sont nommés la latitude et la longitude et sont quantifiés en degrés.
La latitude balaye la sphère terrestre du sud au nord et la longitude de de l’est en ouest. Ainsi, si on dit à quelqu’une de se rendre à la position 10°N, 20°W, il doit se rendre 10° au Nord de l’équateur et 20° à l’Ouest du méridien de Greenwich.
La sphère céleste
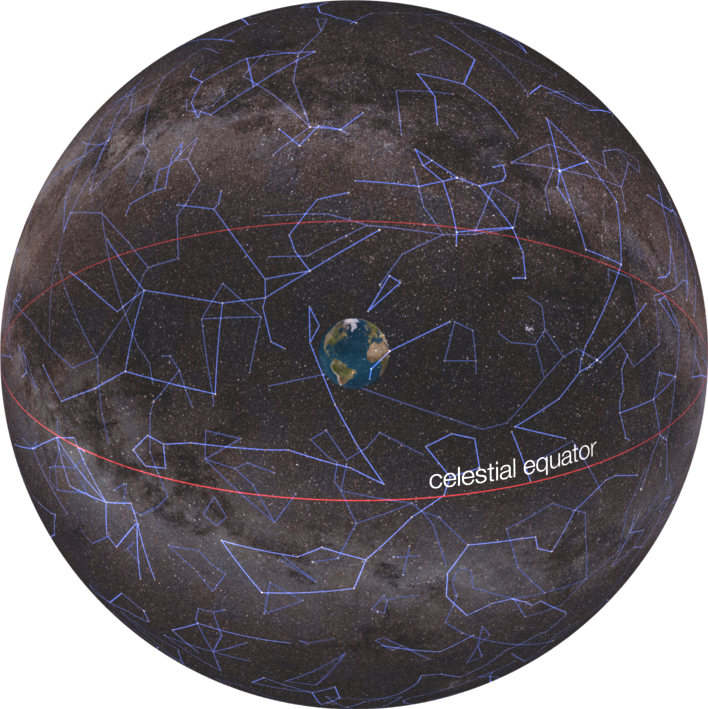
L’idée est la même avec la carte des étoiles. Il faut s’imaginer une sphère céleste, où se trouvent les étoiles, et que le centre de cette sphère est le centre de la terre. Cette sphère est infiniment grande, et parce qu’elles sont à des positions fixes, les étoiles sont toujours aux mêmes angles sur cette sphère.
Sur cette sphère, on doit alors fixer un point de référence et deux axes pour avoir un système de coordonnées. Par convention, le point de référence se nomme le point vernal (ang. point of aries). Dans les almanachs, il est parfois désigné par le symbole de capricorne (♈).
Sur cette sphère, la latitude et la longitude sont remplacés par la déclinaison (ang. declination, ou Dec) et l’angle horaire sidéral (ang. sideral hour angle, ou SHA). Ces termes ont presque la même signification que la latitude et la longitude, mais sont sur la sphère céleste.
La déclinaison (Dec) mesure à quel point on va vers le nord ou vers le sud de la sphère céleste. Elle a exactement les mêmes unités que la latitude. Elle varie de 90°S à 90°N, selon qu’on est en dessous ou au dessus de l’équateur céleste. Il faut simplement se rappeler qu’on balaie la sphère céleste au lieu de balayer la terre.
L’angle horaire sidéral (SHA) mesure à quel point on va d’Est en Ouest sur la sphère céleste. Cependant, la convention est de mesurer de 0° à 360° plutôt que de 180°E à 180°W. L’angle horaire sidéral démarre ainsi à 0° au point vernal et, au fur et à mesure qu’on va vers l’ouest, l’angle horaire sidéral se rend jusqu’à 360° (un tour complet). Cette différence de convention mènera à quelques complications lorsqu’on sera aux étapes de calculs.
Le tableau ci-dessous résume les correspondances entre les deux systèmes de coordonnées.
| Sphère terrestre | Sphère céleste | |
| Point de référence | Intersection de l’équateur et du méridien de Greenwhich | Point vernal (♈). |
| Coordonnée « est-ouest » | Longitude (180°E à 180°W). | Angle horaire sidéral (SHA, 0° à 360°) |
| Coordonnée « nord-sud » | Latitude (90°S à 90°N). | Déclinaison (90°S à 90°N) |
La carte du ciel
Ce système de coordonnées permet de faire une carte du ciel à l’aide d’une projection de Mercator. Ci-dessous, on peut voir une carte moderne de navigation qui est produite par l’Observatoire naval américain. L’axe « Est – Ouest » est l’angle horaire sidéral (SHA) et l’axe « Nord – Sud » est la déclinaison (Dec). Le point vernal (♈) est le point (0°, 0°) de la carte, soit à gauche et à hauteur moyenne de l’image.
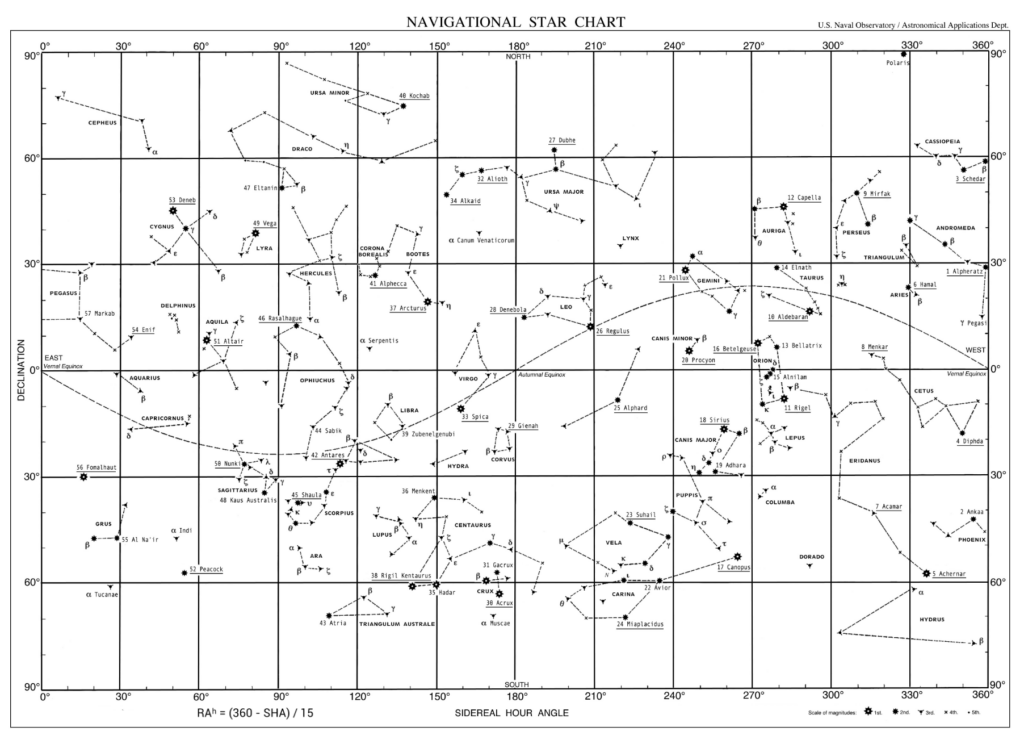
Avec une telle carte, on peut utiliser le système de coordonnées pour repérer les étoiles. Par exemple, l’étoile Polaris (l’étoile polaire) est à peu près à la coordonnée Dec = 90°N, SHA = 330°, signifiant que sa déclinaison est à 90° au Nord et que son angle horaire sidéral est de 330°. Similairement, l’étoile Hadar est à peu près à la coordonnée 60°S, 150°.
Dans le texte portant sur la planification des relevés astronomiques, nous verrons qu’il faut savoir déterminer des positions précises au degré près sur cette carte. Plus souvent qu’autrement, cette position représentera la prolongation de notre position terrestre sur la sphère céleste (i.e.. notre Zénith).
E pur si mueve!
La théorie de navigation astronomique présume que les les étoiles sont fixes. Cependant, la terre tourne à raison de 15° par heure (360° / 24 h = 15° par heure). Ainsi, du point de vue de la terre, la carte du ciel tourne à raison de 15° par heure. Même chose pour le point vernal (♈): il se déplace avec la carte du ciel.
C’est un point clé à comprendre: même si les étoiles sont fixes, la rotation de la terre fait en sorte que de notre point de vue, elles tournent à raison de 15° par heure. Pour identifier la position d’une étoile du point de vue de la terre, il faut ainsi connaître la date et l’heure.
Cette idée se traduit directement dans le système de coordonnées choisi. L’angle horaire local (SHA) d’une étoile, dont la référence est le point vernal, est toujours fixe (car les étoiles sont fixes dans le ciel et le référent est la sphère céleste). Par contre, l’angle horaire de Greenwich (GHA) d’une étoile, dont la référence est le méridien de Greenwich, change à raison de 15° par heure, parce que le méridien de Greenwich tourne à raison de 15° à l’heure.
C’est le rôle des almanachs destinés à la navigation astronomique que de fournir, pour heure et chaque jour de l’année, la position du point vernal par rapport au méridien de Greenwhich. Parce que l’écart angulaire entre le point vernal et chaque étoile est fixe (le SHA), on peut alors déduire le GHA d’une étoile par calcul.
Ce faisant, on peut trouver la position de chaque étoile en termes de coordonnées terrestre. Si on ce trouve à cette coordonnée terrestre, alors l’étoile se trouve directement au dessus de notre tête. On dit que l’étoile est à notre zénith (image ci-dessous).
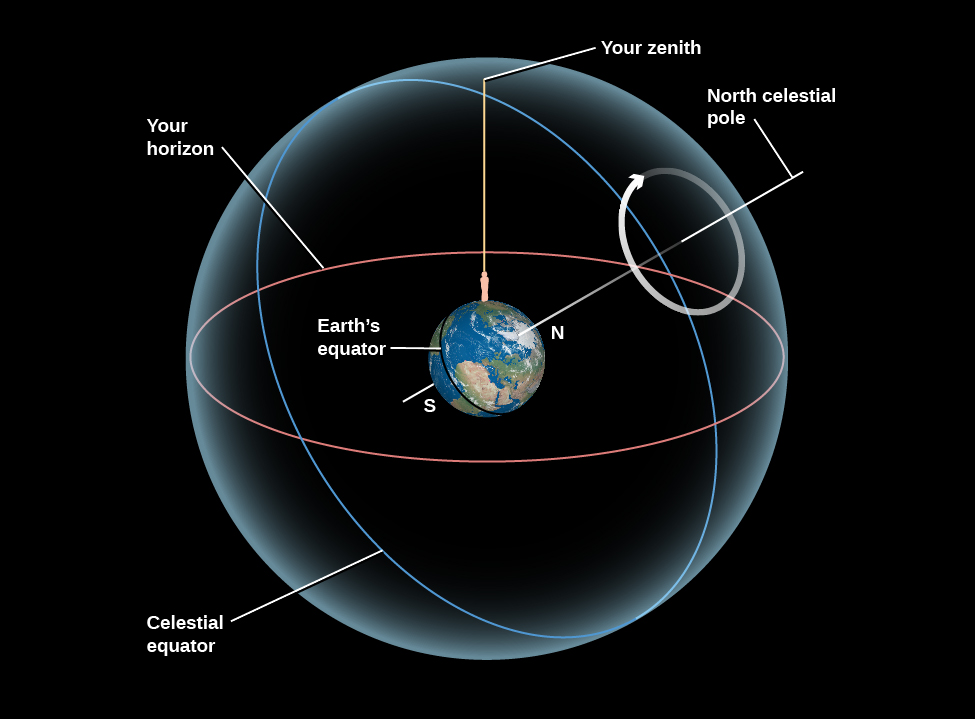
Géométriquement, la coordonnée terrestre du zénith correspond au point où la droite reliant l’étoile au centre de la terre croise la surface terrestre. Cet endroit se nomme le pied du corps céleste (ang. geographical position, ou GP).
Les rayons d’étoile sont parallèles
La troisième simplification est de présumer que les étoiles sont infiniment loin de la terre. Cette simplification implique que les rayons de lumière qui arrivent de l’étoile sont, peu importe où on se trouve sur terre, parallèles. Cette simplification géométrique permet de transformer la mesure de l’angle faite au sextant en mesure de distance au pied de l’astre. On peut ainsi établir des cercles de position.
La Figure ci-dessous illustre cette notion. Elle est importante, et il faut prendre la peine de bien la comprendre. À la droite de la Figure, on voit l’étoile et ses rayons lumineux se dirigeant vers la terre (à gauche). À des fins d’illustration, seulement deux rayons lumineux sont présentés en pointillés. Ils sont parallèles. Le premier rayon pointillé se rend à notre position sur terre. Le second rayon se dirige vers le centre de la terre. Conséquemment, ce deuxième rayon définit le pied de l’étoile sur terre.
À gauche, on voit la sphère terrestre. Notre position illustrée dans la Figure est à l’extrémité de la flèche « Nous ». L’angle entre l’horizon et les rayons lumineux de l’étoile est illustré en vert (\theta dans la Figure). Cet angle est précisément ce que mesure un sextant.
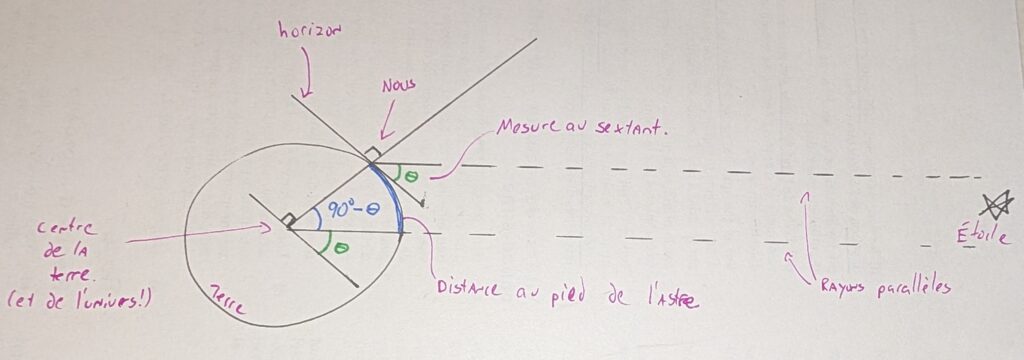
Maintenant, reportons cet angle \theta au centre de la terre en gardant l’horizon parallèle. Dans la Figure, cet angle est toujours en vert, mais au centre de la terre. Notons également que l’angle entre l’horizon et la droite entre le centre de la terre et notre position est un angle droit (90°). Conséquemment, l’angle entre notre position et celle du pied de l’astre est de 90° - \theta.
On se rappelle que la définition un mille nautique correspond à une minute d’arc (un soixantième de degré) de la circonférence de la terre, soit 1852 mètres. Conséquemment, si on prend l’angle 90° - \theta et qu’on le multiplie par 60 minutes d’arc, on obtiendra la distance au pied de l’astre en milles nautiques. Ce faisant, si nous voyons un angle \theta au sextant, nous sommes nécessairement à 60(90° - \theta) milles nautiques du pied de l’astre.
L’almanach nous dit exactement où est le pied de l’astre au moment où nous avons pris notre relevé au sextant. Conséquemment, on peut établir un cercle de position autour du pied de l’astre dont le rayon est, en milles nautiques, 60(90° - \theta) et nous sommes nécessairement sur ce cercle.
Il suffit de répéter l’idée
Si on prend plusieurs relevés de différents corps céleste, on obtient alors plusieurs cercles de position. Puisque nous sommes nécessairement sur ces cercles de position, leur intersection correspond alors à notre position.
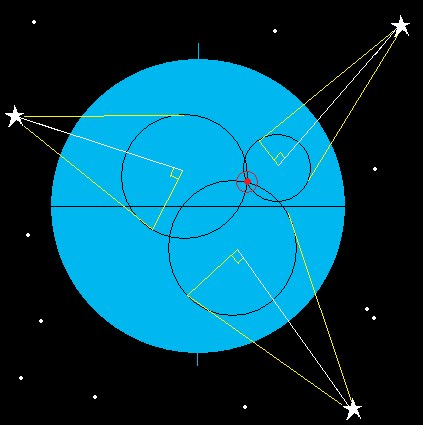
L’image ci-dessous résume l’idée avec trois mesures d’astres. Les pieds d’astres sont indiqués par les symboles d’angle droit en jaune et les cercles de position sont en noir. Les rayons en jaune correspondent à la distance calculée par 60(90° - \theta). L’intersection des trois cercles (point rouge) donne ainsi une et une seule position, soit la position du navire.
Les petits segments de sphère sont des droites
En principe, là s’arrête la théorie de la navigation astronomique, car nous avons réussi à convertir des mesures d’astres en une position sur terre. Il reste cependant un défi pratique d’importance: il est impossible de tracer les cercles de position sur une carte. Ils sont trop grands! Pour donner une idée, un relevé au sextant de 45° se traduit par un cercle de position de 2700 milles nautiques! Sur la quasi-totalité des cartes servant à la navigation, cette distance est trop grande pour faire un tracé d’une quelconque utilité.
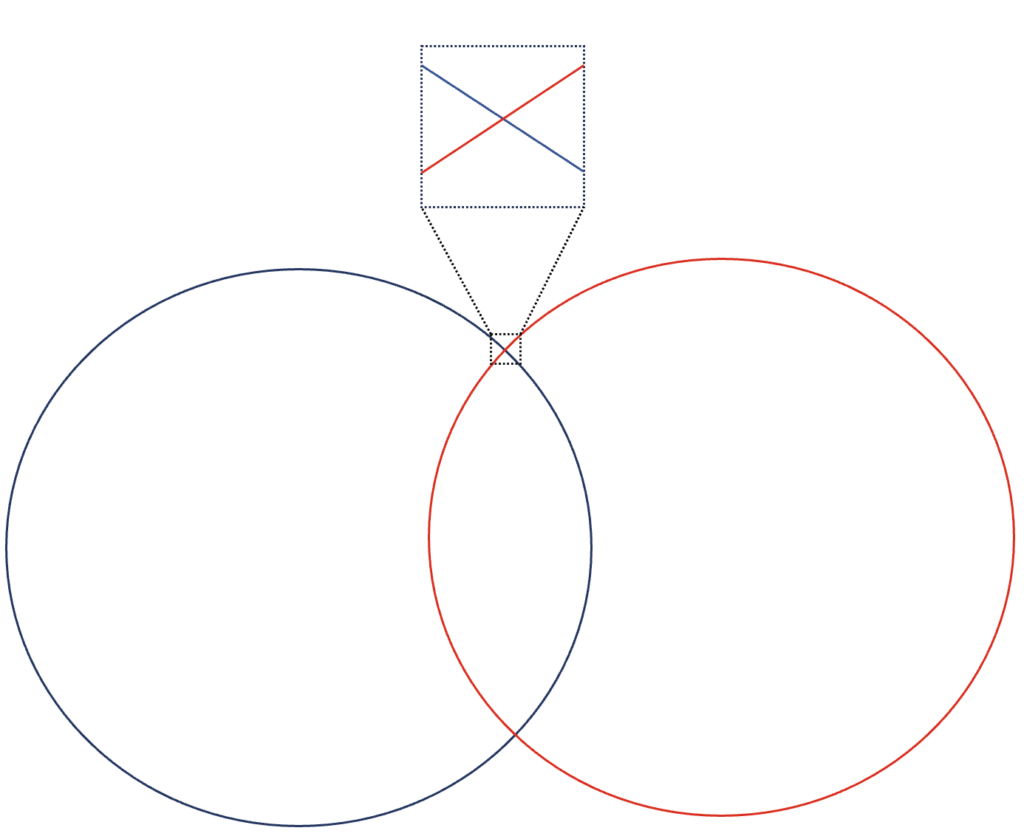
Il nous faut ainsi une technique pour transformer nos cercles de position en quelque chose d’utile à l’échelle des cartes marines. C’est là que la quatrième simplification de l’univers devient utile: avec une résolution (zoom) suffisamment grande, tout segment de cercle de position finira par ressembler à une droite. L’image ci-dessous résume l’idée: les deux cercles de position, lorsque ramenés à l’échelle d’une carte, donnent l’impression de deux droites de position (dont l’intersection est bien sûr la position).
Au choix, c’est soit le travail de la publication Ho 249 ou des équations de trigonométries sphérique que de convertir les cercles de position en droites de position utiles pour faire des tracés sur une carte. Cette étape de « conversion » fait l’objet d’un texte entier.
C’est beaucoup d’approximations!
Il est évident que les simplifications employées par la théorie de navigation astronomique génère des erreurs. La terre n’est pas au centre de l’univers, et les étoiles se déplacent. Mais là est la partie appréciable de la technique: les erreurs sont importantes sur le plan conceptuel, mais sont subtilement corrigées en arrière plan.
Les étoiles bougent par rapport à nous… et elles bougent entre-elles. Rien n’est fixe comme le suppose la théorie. En arrière plan, les astronomes qui construisent les almanachs tiennent compte de la dérive des étoiles: c’est pourquoi ces publications sont annuelles et doivent être remplacées. Les erreurs découlant de cette simplification sont ainsi corrigées au fil du temps.
Il en va de même pour la distance des étoiles: cette distance est finie et se mesure en milliards de kilomètres (et plus). À l’échelle de la planète, ces distances sont tellement grandes qu’on peut dire qu’elles sont infiniment éloignées. Donc même si les rayons provenant des étoiles ne sont pas exactement parallèles, ils sont tellement proche de l’être que l’erreur associée à cette hypothèse est négligeable.
En somme, la mentalité de conception de la théorie de navigation astronomique est très proche de celle en ingénierie: on utilise des approximations qui ne sont pas des vérités universelles, mais qui sont assez bonnes pour en faire une technique fonctionnelle.



8 Responses
[…] du 21, 22 et 23 février 2026. Sur la première page, on y rapporte la position du pied du point vernal (Aries) et des pieds des planètes Venus, Mars, Jupiter et Saturn. Pour aider à comprendre, […]
[…] développant une théorie de la navigation astronomique, nous avons vu que la position du navire est établie à partir de cercles de position autour du […]
[…] est bon de revenir à notre théorie de la navigation astronomique. Les « lignes de position » que nous avons tracées sont en fait des approximations de cercles […]
[…] le texte portant sur la théorie de la navigation astronomique, nous avons discuté du fait qu’à l’échelle des cartes de navigation, les cercles de […]
[…] que nous avons vu dans le texte sur la théorie de navigation astronomique que chaque minute mesurée sur le sextant correspond à 1 mille nautique ajouté au cercle de […]
[…] astro: publications et outils essentielsThéorie de navigation astronomiqueFaire des relevés au sextantCorrections d’un relevé au sextantTrouver le pied d’un […]
[…] below, covering the 21st, 22nd and 23rd of February 2026. The first page shows the position of the vernal equinox (Aries) and the positions of the planets Venus, Mars, Jupiter and Saturn. The positions of the […]
[…] saw in the section on the theory of celestial navigation that each minute measured with the sextant corresponds to 1 nautical mile on a position circle. An […]