Ce texte est le cinquième de onze portant sur la navigation astronomique. Il se concentre sur la méthode pour convertir les relevés pris au sextant en droite de position, soit une réduction d’observations au sextant. Le texte déterminant comment trouver le pied d’un corps céleste est une lecture préalable.
La réduction est la partie qui demande le plus d’attention. Elle comprend plusieurs concepts combinés. En lisant ce texte, vous serez en mesure de calculer ce qu’il faut pour tracer une droite de position. Vous comprendrez également pourquoi ces calculs fonctionnent.
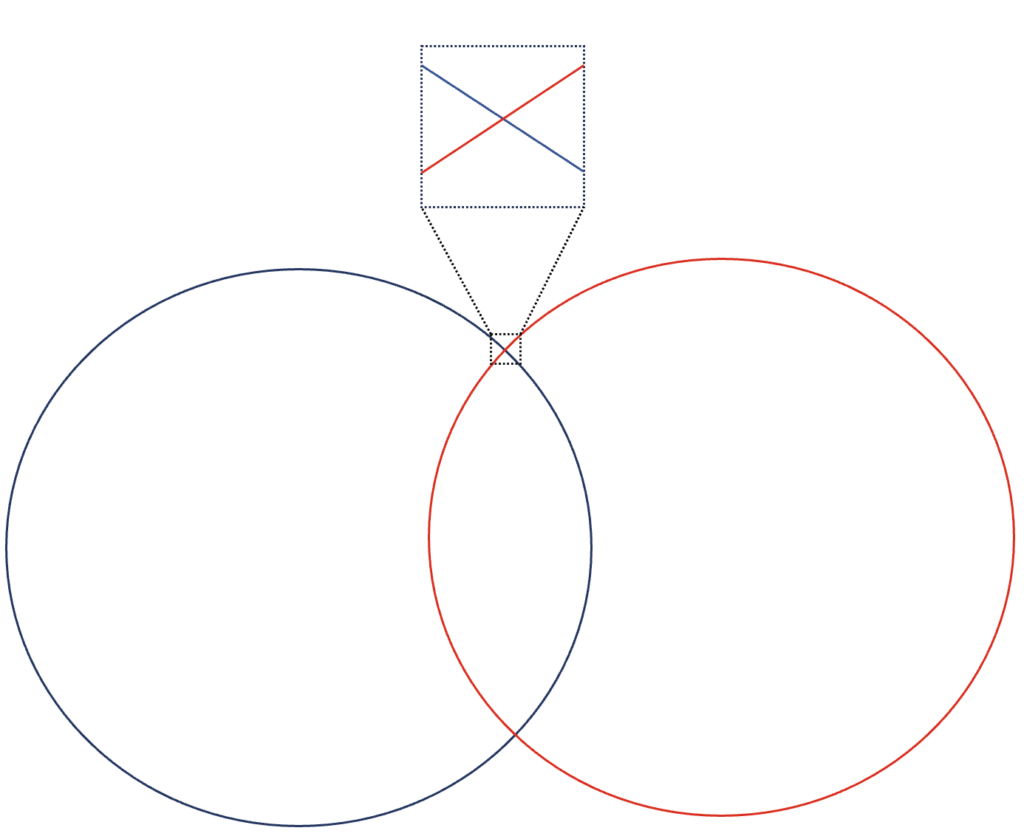
En pratique, il faut au moins deux relevés au sextant pour obtenir au moins deux droites de position. La position de votre navire est alors à l’intersection des droites obtenues. Dans l’image ci-dessus, l’intersection des deux cercles de position donneraient la position du navire.
Dans le texte portant sur la théorie de la navigation astronomique, nous avons parlé du fait qu’à l’échelle des cartes de navigation, les cercles de position sont tellement grands qu’on ne peut en voir que des segments.
Une autre conséquence est qu’il est impossible de tracer le pied d’un corps céleste sur la carte comprenant la position du navire. Par exemple, si on se situe à 3600 milles nautiques du pied d’un corps céleste et que l’échelle la carte de notre région couvre un rectangle d’environ 200 milles nautiques par 100 milles nautiques, on peut tout de suite comprendre qu’on ne peut à la fois avoir le pied du corps céleste et sa circonférence (notre position) sur la même carte! Le pied est en dehors de la carte. Il faut donc une approche pratique qui permet de tracer les droites à l’échelle des cartes.
Azimut, distance et droite de position
Au lieu de tracer un cercle de position, on l’approxime par une droite qui représente la partie du cercle de position sur la carte. Pour positionner cette droite sur la carte, il nous faut son relèvement (angle) et un point par laquelle elle passe.
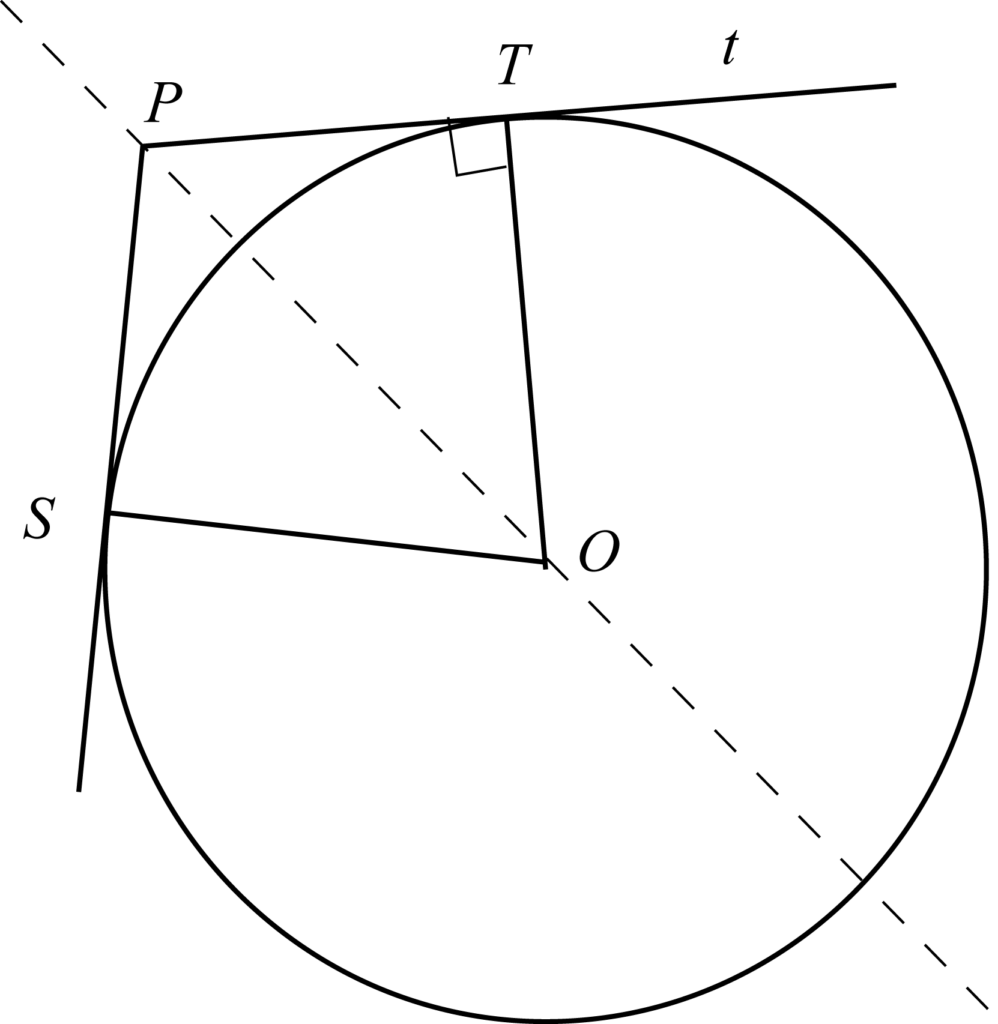
Le relèvement de la droite de position s’obtient en constatant que toute droite approximant une partie de cercle est tangente au rayon du cercle. Dans l’image ci-dessous, la droite PTt est perpendiculaire au rayon TO.
Plus bas, nous verrons comment faire les calculs pour nous donner la direction du pied du corps céleste, soit la direction pointant vers le centre du cercle. Cette direction est nommée l‘azimut et est notée Z_n. Nous aurons ainsi le relèvement de la droite de position en se rappelant qu’elle est perpendiculaire (à 90°) à l’azimut.
On obtient le point par lequel passe la droite de position en calculant une distance à partir d’une position estimée. Ce distance sera soit dans la direction de l’azimut, soit dans la direction opposée (Z_n ou Z_n + 180°).
Combinées, ces informations, nous permettent de tracer la droite de position.
Un exemple
Si on connait l’azimut et la distance à un point connu, on connaît alors tout ce qu’il faut pour tracer une droite de position. Pour s’en convaincre, imaginons qu’on obtienne les informations suivantes à partir de nos calculs:
- L’azimut du pied d’un astre est plein sud (180°);
- La droite de position à est 15 milles nautiques de notre position estimée 10°N, 045°W;
- La distance est dans la direction s’éloignant du pied de l’astre.
Parce que la droite de position est perpendiculaire à l’azimut, on peut déduire qu’elle sera dans la direction du relèvement 270° (180° + 90°), soit une droite dans l’axe Est-Ouest. Parce que la droite est plus éloignée du pied de l’astre et que l’astre est plein sud, on sait également que la droite de position est au point 10° 15’N, 045°W, car un mille nautique vaut une minute de latitude. Ainsi, la droite de position est une ligne Est-Ouest passant par la position 10° 15’N, 045°W.
En pratique, on utilise ces informations pour tracer ses lignes de position sur une carte.
Informations requises pour faire une réduction
Il faut ainsi quatre informations pour faire une réduction:
- Une estimation de notre position, soit une position estimée.
- L’azimut du pied de l’astre (Z_n).
- La distance entre la droite de position et la position estimée.
- Dans quelle direction est la distance de la droite de position: vers l’astre ou en s’éloignant de l’astre.
La position estimée est obtenue par navigation à l’estime (ded’ reckoning). C’est un travail préalable qui doit être fait avec les informations usuelles de navigation: vitesse, cap et dérive. Plus cette position estimée est précise, plus notre position découlant de nos calculs sera précise également.
L’azimut est obtenu par des calculs de triangles sphériques. Cette partie est nouvelle, couverte plus bas et demande soit l’usage des tables de réduction, soit de formules de trigonométrie.
Le calcul de la distance s’estime par la comparaison du relevé au sextant corrigé (nommé la hauteur observée et notée H_o) et le relevé théorique à la position estimée (nommé la hauteur calculée et notée H_c). La hauteur calculée est obtenue soit par l’usage des tables de réduction, soit par l’usage de formules de trigonométrie. Les deux approches sont couvertes dans ce texte. L’obtention de la hauteur observée est donnée par le relevé au sextant auquel on applique des corrections et fait l’objet d’un texte entier.
Nous commencerons par couvrir la base nécessaire pour comprendre les triangles sphériques. Ensuite, nous allons montrer les deux formules de trigonométrie sphérique pour trouver Z_n et H_c. Finalement, nous allons montrer comment travailler avec les tables de réduction. La première approche est plus appropriée pour les mordus de mathématiques. La seconde est plus appropriée pour les personnes qui ont plus de facilité avec les tableaux de données qu’avec des équations trigonométriques. Chacun ses goûts!
Introduction aux triangles sphériques
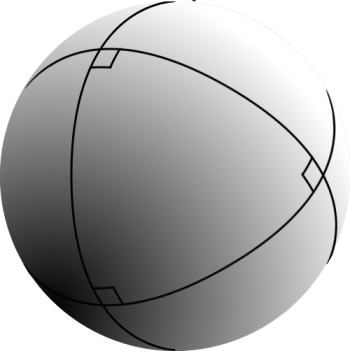
Un triangle sphérique est un triangle tracé sur une sphère. Les propriétés des triangles sphériques sont différente de celles d’un triangle ordinaire (dit « planaire »). Par exemple, la somme des angles d’un triangle ordinaire est toujours égale à 180°. Dans un triangle sphérique, la somme des angles peut être supérieure à 180°.
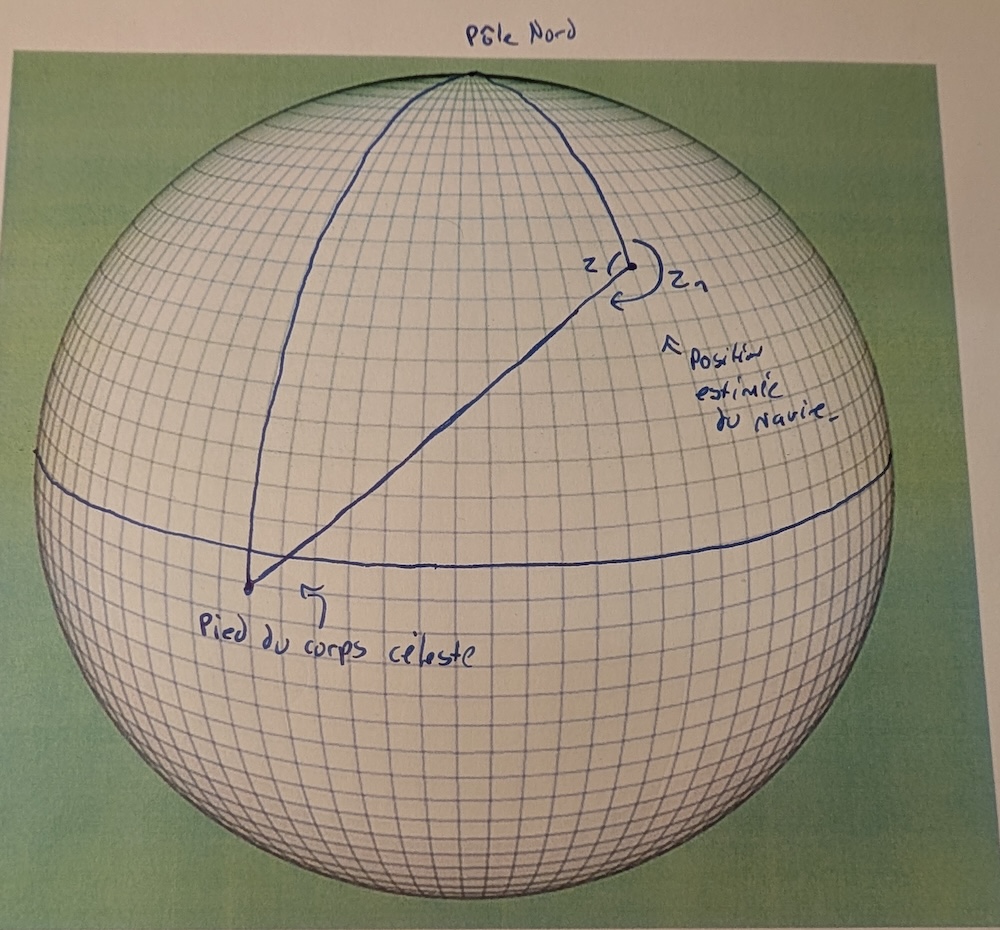
Sur terre, on peut imaginer un triangle partant du pôle nord, se rendant à l’équateur, suivant l’équateur sur 5400 milles nautiques et puis remontant au pôle nord (image de gauche). La somme des angles de ce triangle sphérique est d’exactement 270°!
Parce que la géométrie des triangles sphérique est différente des triangles usuels, les formules associées aux calculs de longueurs des côtés et des angles ne sont pas les mêmes.
Les quatre triangles sphériques de navigation astronomique
En navigation astronomique, on s’intéresse à quatre catégories de triangles sphériques. Ils sont sur la sphère terrestre. Ces triangles sont formés de la position estimée du navire, du pied du corps céleste et de l’un des deux pôles terrestres (soit le pôle Nord, soit le pôle Sud). Le pôle retenu est toujours du même côté que la latitude de la position estimée du navire.
Les propriétés importantes qui distinguent les types de triangles sont si la latitude de la position estimée est au nord ou au sud, et si un angle spécifique fait plus de 180° ou non. Ces conditions génèrent quatre catégories de triangles.
L’angle horaire local (LHA)
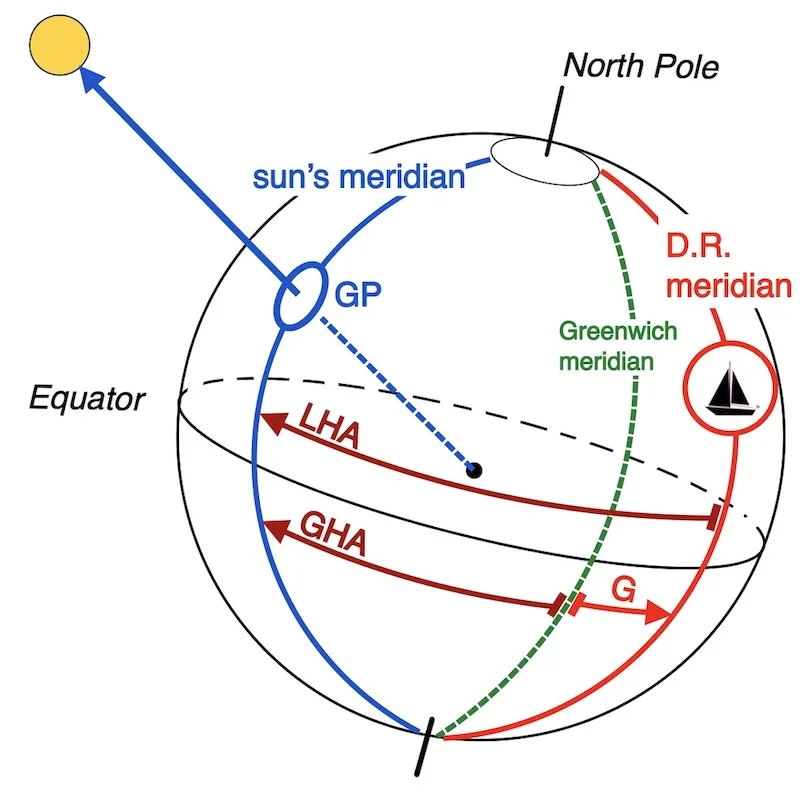
L’angle important pour fin de calcul est appelé l’angle horaire local (noté LHA, de l’anglais local hour angle). Le LHA est l’écart horaire angulaire la position estimée du navire et la position du pied du corps céleste. Dit autrement, c’est la différence entre le GHA du pied du corps céleste et la position estimée du navire.
Le LHA se mesure à partir de la position estimée du navire et est toujours positif. En particulier, quand le GHA du pied de l’astre est inférieur à la position du navire, la différence sera négative. Il faut alors ajouter 360° pour obtenir un LHA positif.
Quatre triangles, quatre formules
Chaque catégorie de triangle demande un calcul différent. Les tables de réduction ou, au choix, les formules de trigonométrie sphérique, nous donneront un écart angulaire noté Z. Ensuite, selon la nature du triangle sphérique, une formule différente permettra d’obtenir l’azimut (Z_n) à partir de Z. Si vous avez compris la correspondance entre le triangle et les formules ci-dessous, vous comprenez cette section. Les formules sont résumées dans le tableau ci-dessous.
| LHA < 180° | LHA > 180° | |
| Latitude estimée au Nord. | Z_n = 360° - Z | Z_n = Z |
| Latitude estimée au Sud. | Z_n = 180° + Z | Z_n = 180° - Z |
Pour vérifier ses calculs, c’est une bonne idée de comprendre pourquoi ces formules changent en fonction du triangle. C’est l’objet des images et des textes associés ci-dessous que de les comprendre.
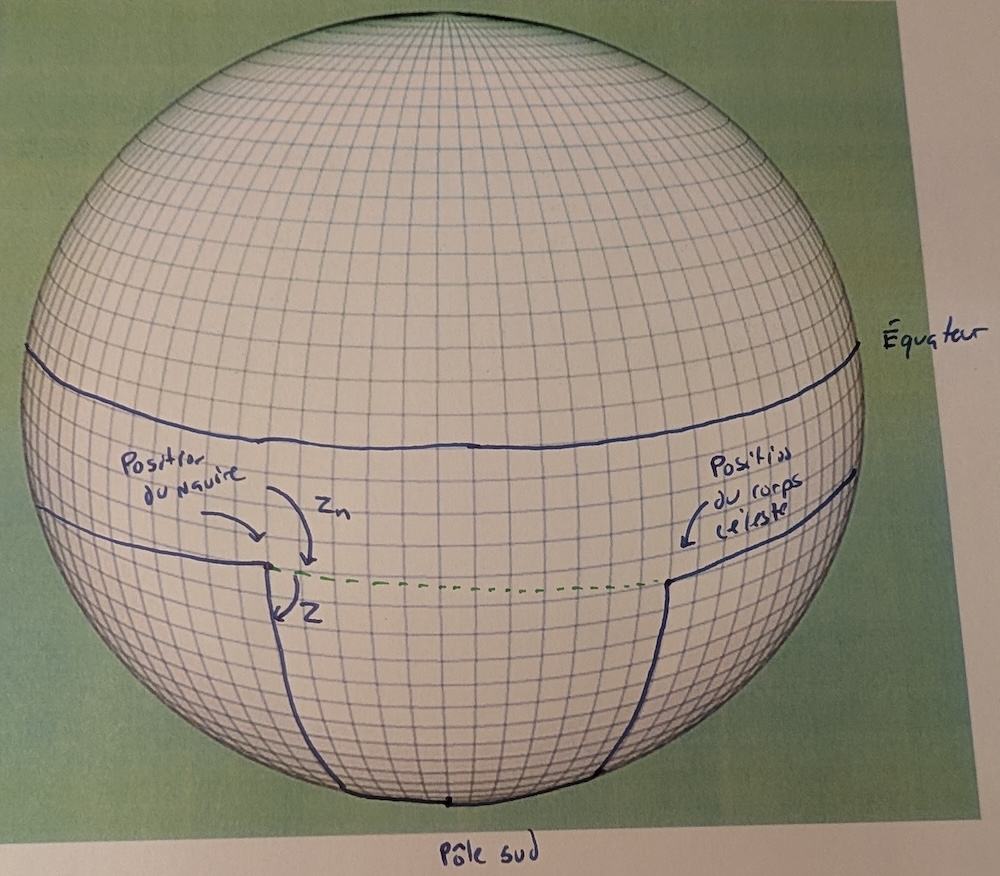
Triangle sphérique #1
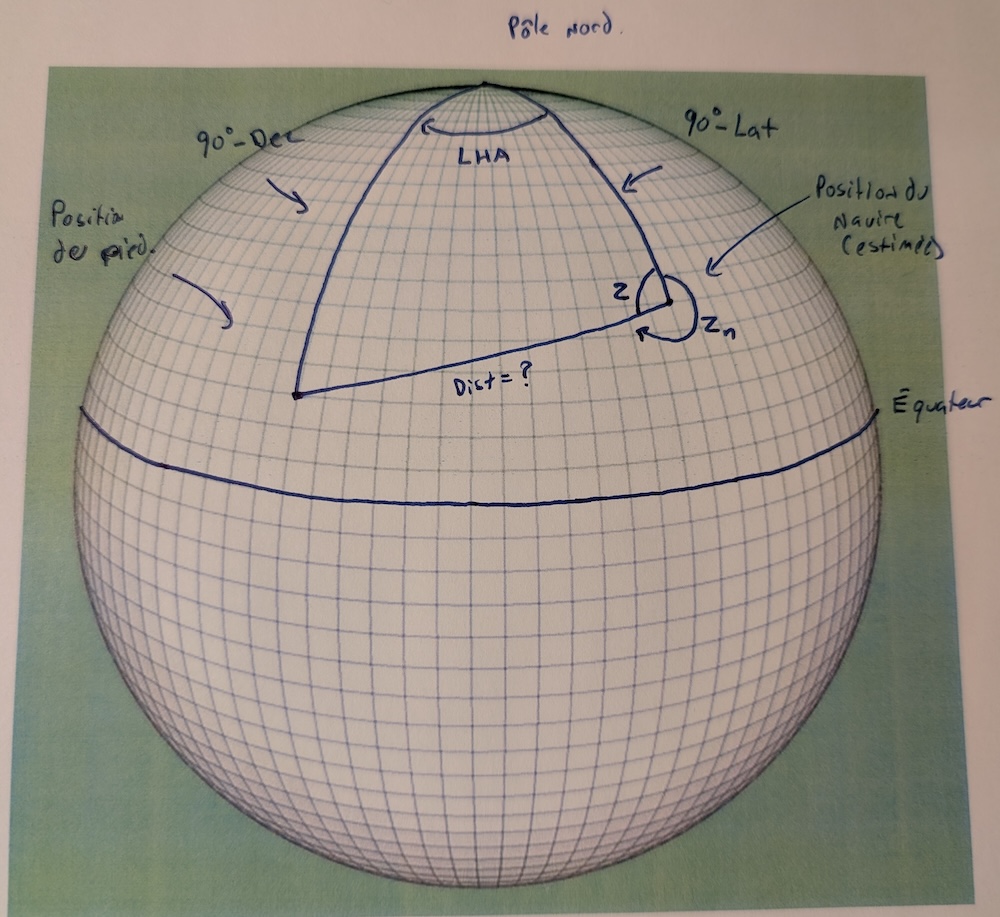
Le premier type de triangle sphérique est illustré dans l’image ci-dessus. On remarque que la latitude de la position estimée et de la déclinaison du pied du corps céleste sont toutes les deux dans l’hémisphère Nord. De plus, le LHA est inférieur à 180°, car on peut voir tout les côtés du triangle dans l’image.
Si on se concentre sur la position du navire dans l’image, on voit que le calcul de trigonométrie sphérique Z et l’azimut Z_n font un total de 360°. L’image nous permet ainsi de comprendre que si la latitude est au nord et que le LHA est inférieur à 180°, l’obtention de l’azimut passe par la formule:
Z_n = 360° - Z.
Triangle sphérique #2
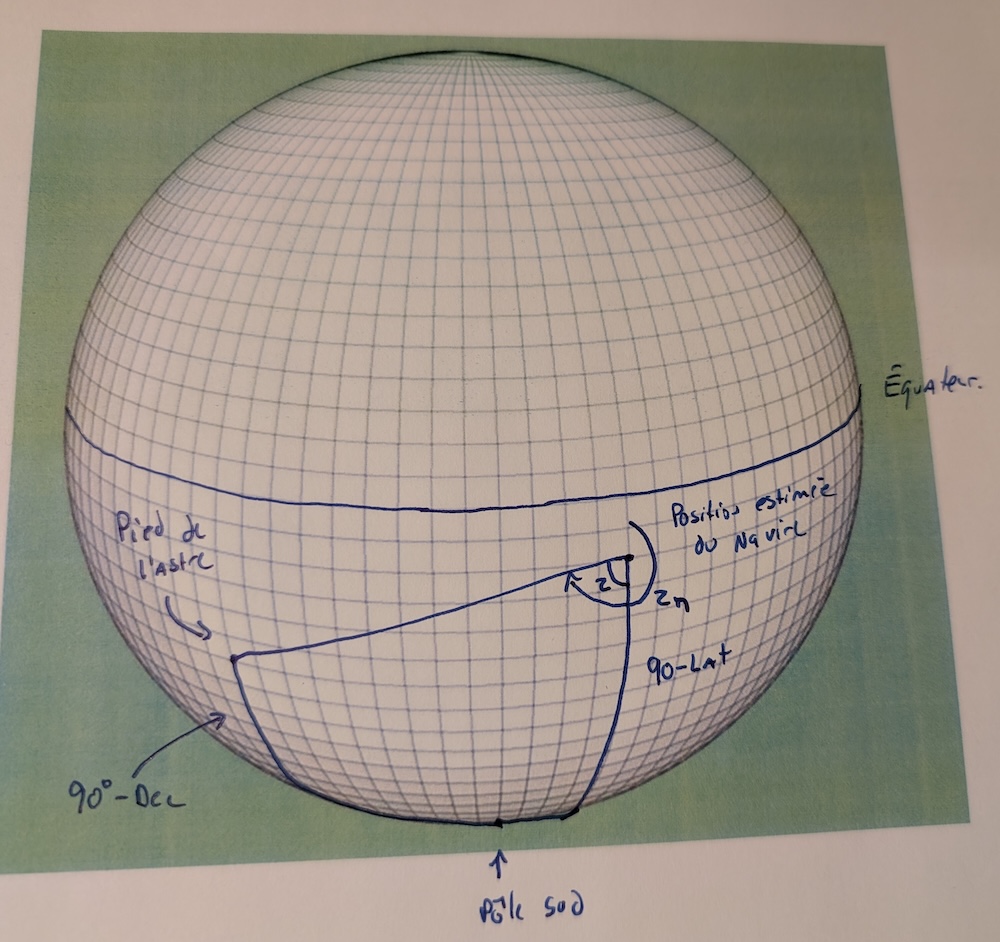
Le deuxième type de triangle sphérique est tel que la position estimée du navire est dans l’hémisphère sud. De plus, le LHA est inférieur à 180°, car on peut voir tout les côtés du triangle dans l’image.
Dans ce cas, l’image nous permet de voir que l’azimut Z_n est la somme de 180° et l’angle Z:
Z_n = 180° + Z.
Triangle sphérique #3
Dans le troisième cas, la position estimée du navire est dans l’hémisphère Nord. Cependant, l’angle horaire local (LHA) est supérieur à 180°. On peut le constater dans l’image par le fait qu’un côté du triangle (en bleu) est caché parce qu’il passe de l’autre côté de la sphère.
Dans ce cas, les calculs de triangle sphérique se font en prenant les angles du triangle complémentaire (dont un côté est en vert pointillé dans l’image). La valeur calculée de Z pour ce triangle complémentaire correspond alors directement à l’azimut.
Ainsi, si le LHA > 180° et que la latitude est au nord:
Z_n = Z.
Triangle sphérique #4
Le quatrième triangle sphérique est tel que la position estimée du navire et le pied du corps céleste sont dans l’hémisphère sud. De plus, l’angle horaire local (LHA) est supérieur à 180°, car un des côté est derrière l’image.
Dans ce cas, le calcul sur l’angle Z est fait sur le triangle complémentaire (dont un côté est en vert pointillé). La relation entre Z et l’azimut (Z_n) est alors donné par:
Z_n = 180° - Z.
Hauteur calculée et Z par trigonométrie sphérique
Si vous êtes familier avec la trigonométrie, l’obtention de la hauteur calculée H_c et de l’angle Z de chaque triangle sphérique s’obtient avec les deux formules ci-dessous:
\begin{align}
H_c&=\sin^{-1}\left[\sin(Dec)\sin(Lat)+\cos(Lat)\cos(Dec)\cos(LHA)\right],\\
Z &=\cos^{-1}\left[\frac{ \sin(Dec) - \sin(Lat)\sin(H_c)}{\cos(Lat)\cos(H_c)}\right],
\end{align}où Dec est la déclinaison de l’astre, Lat est notre latitude estimée et LHA est l’angle horaire local. Ces formules sont une application de la loi des cosinus pour les triangles sphériques.
On devrait remarquer que la deuxième formule requiert la valeur de la première formule pour être appliquée. Il faut donc les calculer dans l’ordre.
En pratique, il suffit d’entrer les valeurs demandées dans une calculatrice en prenant soin de travailler en degrés. (C’est aussi possible de travailler en radians, mais il faut adapter les formules de correction en remplaçant 180° par \frac{\pi}{2}, etc).
Pour les intéressés, il y a un bon vidéo youtube (en anglais) sur la dérivation de ses équations. Pour les besoins de navigation astronomique, il faut seulement savoir utiliser les équations.
Hauteur calculée et Z par table de réduction
Les tables de réduction sont l’équivalent en papier d’une calculatrice. C’est un tableau qui fait les calculs pour nous. Pour une latitude estimée donnée, un LHA donné et une déclinaison donnée, les tables vont nous fournir la hauteur calculée H_c et l’azimut Z_n. L’avantage est qu’aucune calculatrice (et aucune trigonométrie) n’est requise. Par contre, les tables de réduction font plus de 1000 pages et demandent quelques adaptations.
Adaptations
Pour réduire le volume des tables de réduction, seules les positions entières de latitude sont rapportées. Similairement, seules les positions entières de LHA sont consignées. Conséquemment, il faut modifier sa position estimée de deux manières:
- Notre latitude estimée doit être le degré entier le plus proche;
- Notre GHA doit être tel que le LHA est un nombre entier. En d’autres termes, la soustraction entre le GHA du pieds du corps céleste et notre GHA estimé doit donner un degré entier.
Ces modifications n’ont pas d’importance pour déterminer la position réelle, car on se rappelle qu’on obtiendra la position réelle relativement à la position estimée. Tant que cette dernière n’est pas trop éloignée, l’approximation de segments de cercles par des droites sera bonne. En restant au degré de latitude le plus proche et en choisissant sa longitude pour que le LHA soit entier, les différences ont peu d’impact.
Les pages des tables de réduction sont également organisées selon que la latitude de la position estimée est ou n’est pas dans le même hémisphère que la déclinaison. Dans l’almanach, on utilise le mot nom (ang.: name) pour désigner si la déclinaison/latitude est au Nord ou au Sud. Si la déclinaison et la latitude sont de même nom (ang.: same name), cela signifie qu’ils sont les deux dans le même hémisphère (soit au Nord, soit au Sud). S’ils sont de nom contraire (ang.: contrary name), cela veut dire que l’un est dans l’hémisphère nord et que l’autre est dans l’hémisphère sud.
L’image ci-dessous montre deux cas de figure. La première image est un cas où la latitude et la déclinaison sont de même nom. L’image montre une déclinaison et une latitude de position estimée au nord. La seconde montre un cas où la déclinaison est au Sud alors que la latitude est Nord. Dans ce cas, ils sont de nom contraire.
Il y a d’autres cas possibles. Ils sont résumés au tableau ci-dessous.
| Latitude au Nord | Latitude au Sud | |
| Déclinaison au Nord | Même nom (same name) | Nom contraire (contrary name) |
| Déclinaison au Sud | Nom contraire (contrary name) | Même nom (same name) |
Identifier la page appropriée des tables de réduction
Les table de réduction sont présentées en trois volumes. Les volumes deux et trois séparent les latitudes en deux, notamment pour éviter d’avoir à transporter trop de pages à bord de son navire. Il faut ainsi retenir le volume où on pense naviguer.
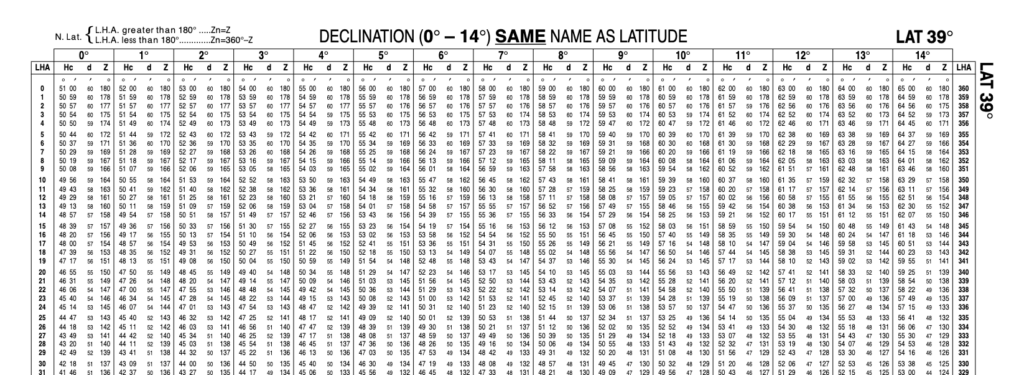
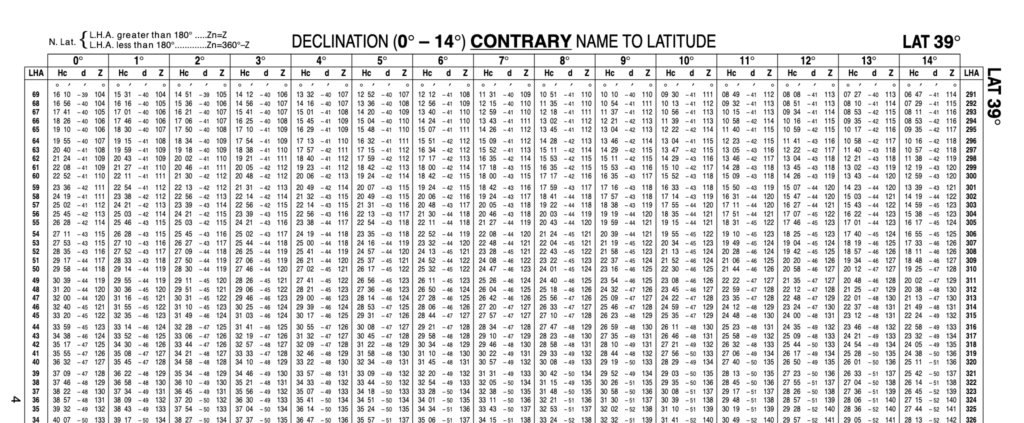
Chaque page est ensuite établie en fonction de la latitude, une plage de déclinaisons et le nom du triangle sphérique (SAME ou CONTRARY). L’image ci-dessus montre la page pour la latitude 39°, les déclinaisons entre 0° et 14° (colonnes) et une déclinaison et latitude de même nom (SAME). La LHA est alors fournie à chaque ligne. En croisant l’intersection d’une colonne et d’une ligne, on obtient alors les valeurs de la hauteur calculée (H_c) et de l’angle Z. Par exemple, on peut voir que pour une déclinaison de 6° et un LHA de 21°, H_c est de 55° 56′ et Z = 145°.
Il faut porter attention à l’ensemble de l’information des tables de réduction. Ci-dessous, l’image montre un extrait de la table pour une latitude de 39°, une plage de déclinaison entre 0 et 14° et pour une déclinaison et une latitude de nom opposés (CONTRARY). Les deux tableaux sont presque identiques! On peut cependant noter que pour une déclinaison de 6° et un LHA de 21°, H_c est de 40° 59′ et Z = 152°. C’est une erreur fréquente que de se tromper de table. Ce faisant, c’est une bonne pratique que de lire deux fois les informations de la table avant de poursuivre.
Une fois les adaptations effectuées, trouver la hauteur calculée et l’angle Z n’est l’affaire que de lire une table. La table fait 1000 pages, alors il faut fouiller les ouvrages un peu pour trouver la bonne page.
Parce que les tables de réduction demandent une position estimée modifiée, il faut conserver cette position modifiée pour les tracés subséquents, car la distance et l’azimut sont basés sur cette position.
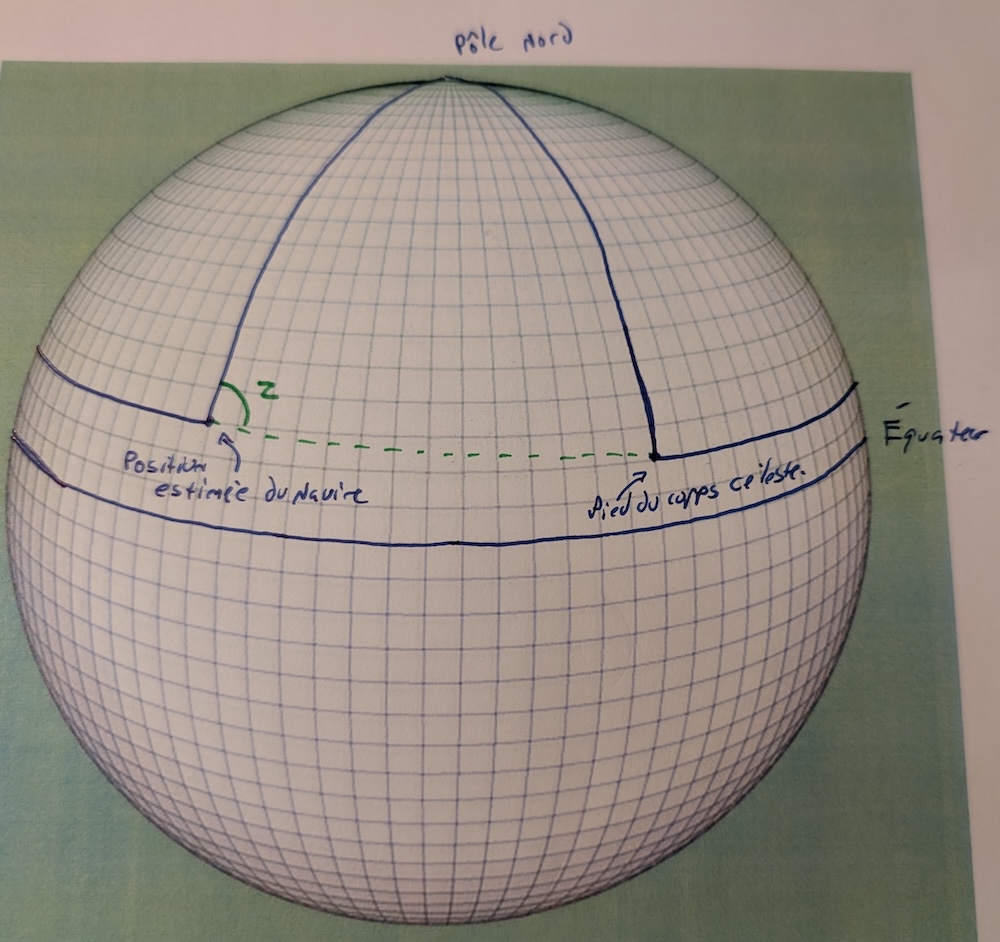
Calculer la distance à la position estimée
Les calculs de triangle sphériques nous donne la hauteur calculée H_c à cette position. Le relevé fait au sextant H_o donne la distance réelle à notre position réelle. L’écart entre les deux (H_c - H_o) nous donne la distance en degrés et minutes. Comme un mille nautique correspond à une minute d’angle, on peut convertir cet écart en distance pour avoir la distance entre la position réelle du navire et la position observée.
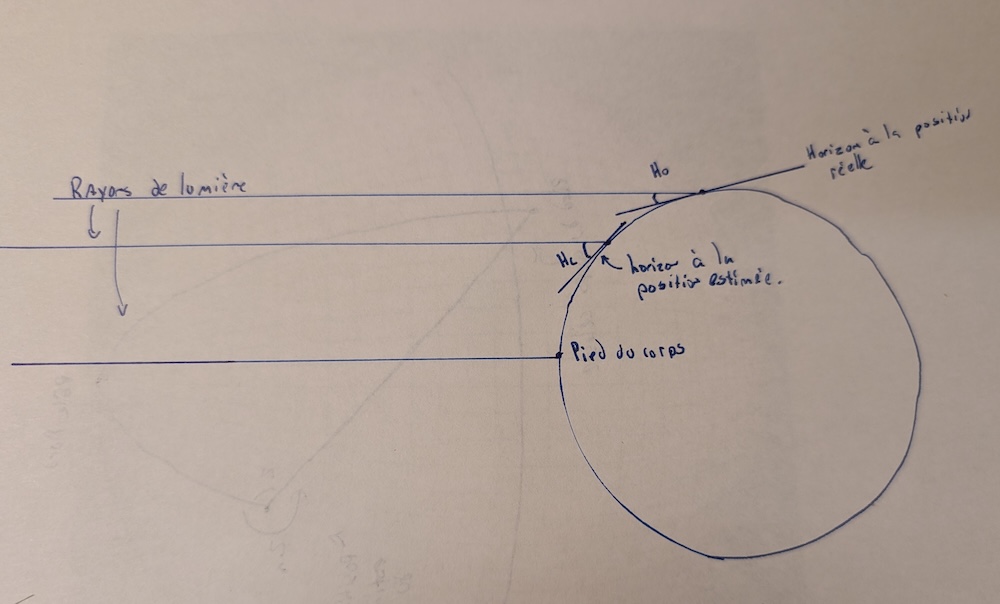
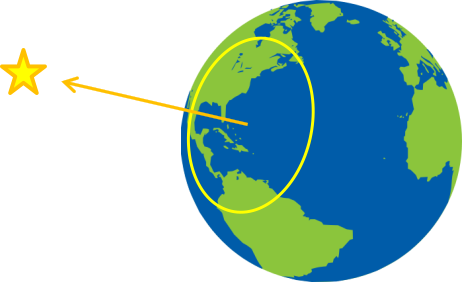
Si l’écart observé H_c - H_o est positif, cela signifie que la hauteur observée est plus petite que la hauteur calculée. Conséquemment, il faut s’éloigner du pied de l’astre. Le dessin ci-dessus illustre ce cas de figure. Quand l’angle observée entre l’horizon et les rayons de lumière du corps céleste est plus petit qu’un l’angle calculé, cela signifie que le rayon de position est plus grand.
Si au contraire l’écart est négatif, cela signifie que la hauteur observée est plus grande que la hauteur calculée et il faut s’approcher du pied de l’astre. On peut refaire le même dessin que le cas précédent, mais en inversant la position H_c et H_o. L’analyse du dessin reste le même.
Conclusion: sommaire procédural
C’est une bonne idée que de faire un sommaire procédural avant de passer aux exemples pratiques.
Les concepts importants:
- Faire une réduction consiste à convertir un relevé au sextant en droite de position. À cette fin, il faut une position estimée et le pied du corps céleste.
- La réduction nous donnera l’azimut du corps céleste (sa direction), la distance de la position de la droite estimée, de même que la direction par rapport à la position estimée.
- Avec ces informations, on peut ensuite tracer une droite de position sur une carte.
- Avec plusieurs lignes de position, on peut trouver l’intersection de droites et établir une ligne de position.
- Un triangle sphérique de navigation comprend la position estimée du navire, le pied du corps céleste et un des deux pôles (Nord ou Sud). Ce sont les mathématiques associés aux triangles sphériques qui permettent de trouver l’angle Z et la hauteur calculée H_c.
- Il y a quatre types de triangles sphériques, chacun avec une formule spécifique pour convertir l’angle Z en azimut Z_n. Il faut savoir appliquer ces formules.
- La distance de la droite de position est obtenue en calculant la différence entre la hauteur calculée H_c et la hauteur observée au sextant H_o.
- Si H_c>H_o, la distance est en s’éloignant du pied de l’astre.
- Si au contraire H_c<H_o, la distance est en s’approchant du pied de l’astre.
La procédure permettant de faire une réduction:
- Noter la déclinaison de l’astre, la position estimée du navire et le pied du corps céleste.
- Noter le nom de la latitude et du pied de l’astre.
- Selon vos aptitudes mathématiques ou à lire des tableaux:
- Utiliser les équations de trigonométrie sphérique:
- Calculer l’angle horaire local (LHA).
- Appliquer les formules pour trouver katex]H_c[/katex] et Z.
- Utiliser les tables de réduction.
- Trouver la valeur arrondie au degré de votre latitude estimée.
- Trouver la valeur de votre longitude estimée telle que votre LHA sera un nombre entier.
- Calculer l’angle horaire local à partir de votre longitude modifiée.
- Identifier H_c et Z dans les tables de réduction.
- Utiliser les équations de trigonométrie sphérique:
- Identifier le calcul approprié pour convertir Z en Z_n.
- Calculer la distance H_c<H_o.
- Si c’est positif, la distance de la position réelle est en s’approchant de l’astre.
- Si c’est négatif, la distance de la position réelle est en s’éloignant.
Les deux prochains textes appliqueront la procédure à partir d’exemples.
Ce texte vous a plus, vous pouvez en lire davantage dans la section Apprendre de ce site.




2 Responses
[…] technique fait l’objet d’un texte entier. On peut cependant comprendre l’idée: dès que les mesures de sextant sont établies, on […]
[…] ce texte, ses informations sont présumées acquises à partir des calculs de réduction. Les exemples donnent ces informations. Le texte se concentre l’usage de ces informations […]