This eleventh text in the series on celestial navigation covers the use of solar observations to determine the compass deviation associated with a course. In addition to the first six texts in the series, some prior knowledge of basic coastal navigation is required. In particular, you should be familiar with the concepts of compass course, true course, declination and deviation.
As a general rule, compasses have an inherent measurement error. Whether they are gyrocompasses or magnetic compasses, there is a discrepancy between true bearing and magnetic bearing. For magnetic compasses, this difference depends on magnetic declination, but also on deviation. Ideally, a magnetic compass would be compensated using magnets to minimise deviation errors. Compass compensation is generally a job for a professional.
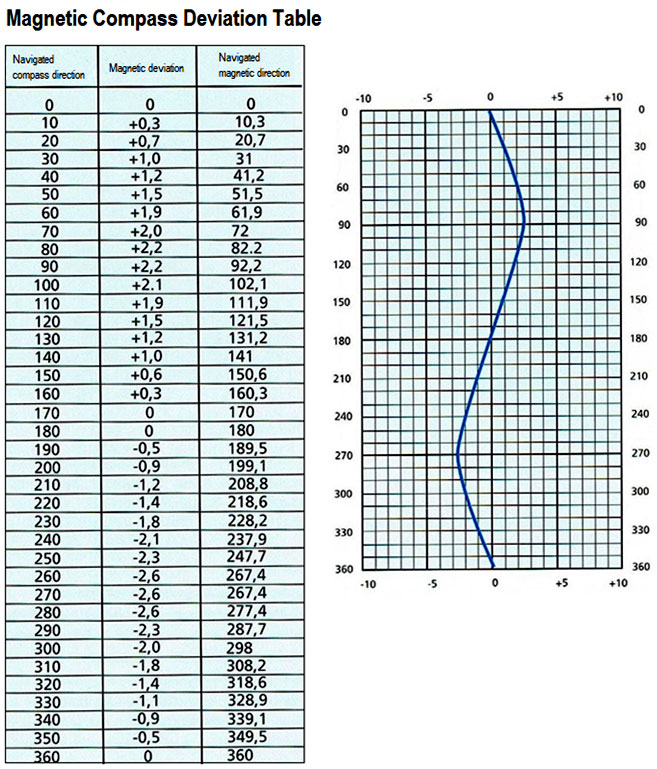
In practice, it is useful to measure the deviation and compile a table. With this table, one can correct the discrepancies and navigate with greater safety. At the start of this text, you can see a typical deviation table for a magnetic compass. For example, it shows that for a compass bearing of 280°, the compass deviation is -2.6°.
Creating a deviation table from a sun bearing
There are various techniques for checking compass error. The simplest involves using any alignment on a nautical chart and comparing the magnetic bearing of that alignment with that of the compass. The difference then gives the deviation for that bearing.
In offshore navigation, however, it is not possible to use coastal landmarks. One must therefore rely on the stars – most often the sun – to deduce the deviation. The procedure is summarised below:
- Optional:
- Wait until the sun is directly in front of the yacht. This procedure will then allow you to determine the deviation for the current heading.
- Steer the yacht so that it faces the sun. This procedure will then allow you to determine the deviation at that heading.
- Read the compass bearing.
- Note the time and your position.
- Determine the azimuth Z_n by calculating the bearing.
- Convert this true azimuth to magnetic azimuth using the magnetic declination known for the region.
- Compare the two to deduce the deviation from the known bearing.
No sextant observations are required, but your position is required (or, alternatively, observations giving the position). A single reduction is required. By repeating the exercise for different courses, a deviation table can then be constructed.
Exercise
On 15 December 2026, you are sailing on a bearing of 222° on the magnetic compass at the position 15°N / 065°W. The magnetic declination is 16° West. At 21:20 UTC-4, the sun is directly ahead. Determine the magnetic deviation for this bearing.
Solution
The first part is a standard exercise in reducing a sight. You need to determine the sun’s position, then reduce the observation to obtain Z_n. You must then add the declination of 16° West to Z_n to obtain the magnetic bearing associated with the bearing. By comparing this with our bearing taken at the time of the observation, we can deduce the deviation.
At 21:20 UTC-4, it is 17:20 UTC-0. The position of the sun at 17:00 is given by GHA 76° 11.7′ / Dec 23° 17.3’S. For the additional twenty minutes, the correction tables tell us that 5° 00.0′ must be added to the GHA. The GHA is therefore 81° 11.7′. For the declination, we can interpolate the 0.3′ variation over the hour to obtain 0.1′. Thus, the position of the sun at 17:20 (UTC-0) is GHA 81° 11.7′ / 23° 17.4’S.
As the ship’s position is at 065° W, the local hour angle (LHA) is 16° 11.7′. We have everything we need to use the spherical trigonometry equations and thus obtain H_c\approx 48° 33.7′ and Z = 157° 13.6′. As the LHA is less than 180° and the latitude is north, the formula for obtaining the azimuth is Z_n = 360° - Z = 202° 46.4′.
This azimuth corresponds to your true bearing. Adding the magnetic declination gives a magnetic bearing of 219° (magnetic). The difference from the compass bearing is three degrees, meaning that the deviation is 3°W.
Conclusion

If you understand how to plot a bearing, you can check your compass deviation. For this technique to work, your position must be known. Thus, your position can be deduced from previous astronomical observations, a transposed bearing from the sun, or your satellite positioning system. Here, what matters is having the azimuth of your actual position. By repeating the exercise for different courses, you can compile a complete deviation table.
In practice, this technique is particularly easy to apply using the sun. The sun is bright enough to mark the course to be taken directly on the water (image above). When a celestial body is relatively close to the horizon, it is also possible to apply the same technique using a star, the moon or a planet. However, if the celestial body is too high in the sky, it is difficult to achieve a good alignment.
The technique described above is intended for vessels equipped with a magnetic compass (e.g. sailing boats). On commercial vessels, fitted with one or more gyrocompasses, repeaters are equipped with a sighting device on the bridge. In this case, it is not necessary to align the vessel with the direction of the sun, as the sun’s azimuth can be read directly via the sighting device. The ‘gyro error’ can then be deduced from a single reading.
Did you enjoy this series? You can continue reading the series on celestial navigation, or read others in the Learn section of this site.

1 Response
[…] to plan your star sightsApplication: performing a noon sightApplication: finding the compass deviationApplication: the sun-run-sun […]